人形機器人直線關節部分需要感知的受力情況相對簡單, 使用一維力傳感器, 預計在直線關節部分使用 14 個. 手部關節可能使用一維力傳感器或力矩傳感器 12 個. 旋轉關節部位由於產生轉動, 需要使用力矩傳感器, 預計使用 14 個. 手腕與腳踝部位由於對力控要求高, 力臂變化大, 使用六維力傳感器, 預計一共需要使用 4 個.

預計一整台人形機器人的傳感器成本約為 23.8 萬元, 如以目前樣機階段一台人形機器人價值量 55 萬元進行測算, 則各類傳感器合計在人形機器人中成本占比極高. 各類傳感器中成本佔比最高的為力傳感器, 力傳感器是穩定控制力量&擺動的核心 .

柔順控制是指使機器人感受, 應對外界環境變化的控制方式, 可分為主動柔順控制和被動柔順控制. 主動柔順控制通過獲取對力信息和位置信息的反饋, 結合相應算法實現控制, 控制精度高; 被動柔順控制則主要依靠一些機械裝置 (如減震器, 彈簧等), 控制精度低.

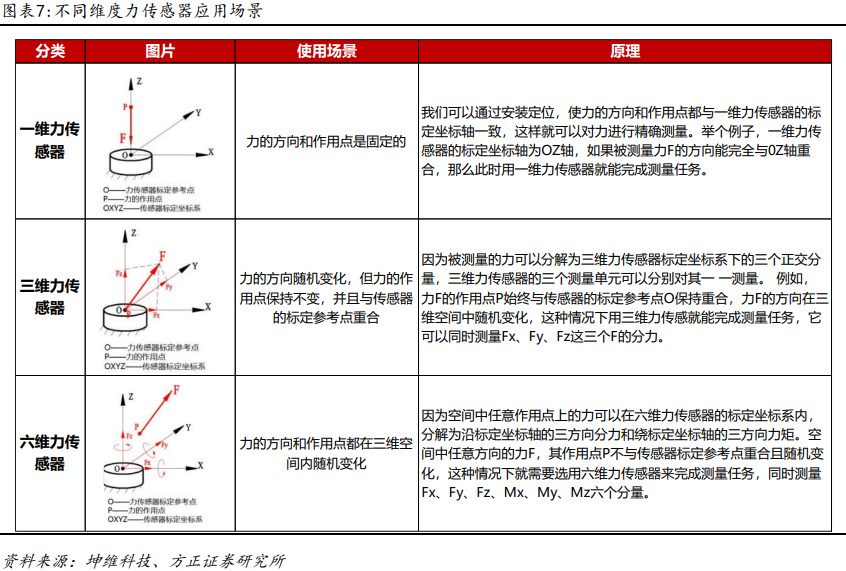
如果力的方向和作用點是固定的, 此時可以選擇用一維力傳感器進行測量, 如天平, 體重計. 如果力的方向隨機變化, 但力的作用點保持不變, 並且與傳感器的標定參考點重合, 那麽我們就應該用三維力傳感器. 而如果力的方向和作用點都在三維空間內隨機變化, 此時應該選擇用六維力傳感器進行測量.
力傳感器是機械, 電子,算法, 計量融合的複雜交叉學科, 技術壁壘較高. 六維力傳感器主要是利用應變計和電荷放大器將機械力矩轉化為電信號. 通常包含一個彈性體和多個應變計. 當傳感器受到力或力矩時, 彈性體的形狀會發生微小變化, 導致應變計電阻值的微小變化.

六維力傳感器可分為電阻應變式, 壓電式, 電容式, 光學式四類. 電阻應變式一般採用金屬絲或應變片作為敏感元件. 壓電式是一種電量型傳感器. 電容式通過設置多對電容, 由極片間相對空隙變化來實現對多維力的測量. 光學式根據安裝光學傳感器的特殊彈性體結構來感應微小變形, 從而測出六維力的各個分量.

全球六維力和力矩傳感器廠商主要分為歐美, 日韓, 中國產三大陣營. 歐美地區廠商: 可分為傳統傳感器制造商如 ATI, Bota, Kistler 等和全球知名機器人末端工具生產商如 OnRobot, Robotiq 等. 日韓廠商: 有 Wacoh-Tech, Robotous 等, 主要配套本地區機器人廠商發那科, 安川等.

人形機器人通常在手腕, 腳踝處安裝六維力矩傳感器共 4 個, 靈巧手單手搭載 6 個六維力矩傳感器, 因此理論上, 單台人形機器人可搭載六維力矩傳感器的數量為 16 套. 出於成本的考慮, 目前靈巧手搭載六維力矩傳感器的方案較少, 手腕和腳踝處安裝六維力矩傳感器的方案較為普遍.

六維力傳感器下游應用中, 工業自動化領域應用規模占比最大, 但人形機器人行業應用規模增速最快. 根據 MIR 數據, 2023 年六維力傳感器應用於工業自動化占比超過 77%, 其次是汽車; 但在人形機器人行業應用規模同比增長 146.7%, 遠超其他行業增速.

目前六維力矩傳感器主要應用於汽車碰撞測試, 航空航天領域, 2022 年中國六維力矩傳感器銷量/市場規模 8360 套/2.39 億元人民幣, 隨著機器人拋光打磨, 精密裝配等領域的應用得到拓展, 預計 2027 年中國市場銷量/規模有望突破 42000 套/15億元, CAGR 分別為 57.97%/52.04%.

所羅門官網
回覆刪除https://www.solomon.com.tw/product/force-sensor/
基仕科技官網
回覆刪除https://www.g4.com.tw/products-view.php?sn=231
SCHUNK 官網
回覆刪除https://schunk.com/tw/zh/zi-dong-hua-ji-shu/li/niu-ju-chuan-gan-qi/c/PUB_8324
HBK 官網
回覆刪除https://www.hbm.com/tw/0264/torque-transducers-torque-sensors-torque-meters/?product_type_no=%E6%89%AD%E5%8A%9B%E6%84%9F%E6%B8%AC%E5%99%A8,%20%E6%89%AD%E5%8A%9B%E8%A8%88
力矩传感器是什么?看完这篇你就明白了!
回覆刪除https://www.sensorexpert.com.cn/article/20668.html
ATI 官網
回覆刪除https://www.ati-ia.com/zh-CN/products/ft/sensors.aspx